视觉与感知
从颜色阈值到四 USB 摄像头,再到 YOLOv8、边缘推理和 LiDAR, 让机器人同时理解球、对手、边界和自身位置。
 Xelerator
Xelerator
System
从颜色阈值到四 USB 摄像头,再到 YOLOv8、边缘推理和 LiDAR, 让机器人同时理解球、对手、边界和自身位置。
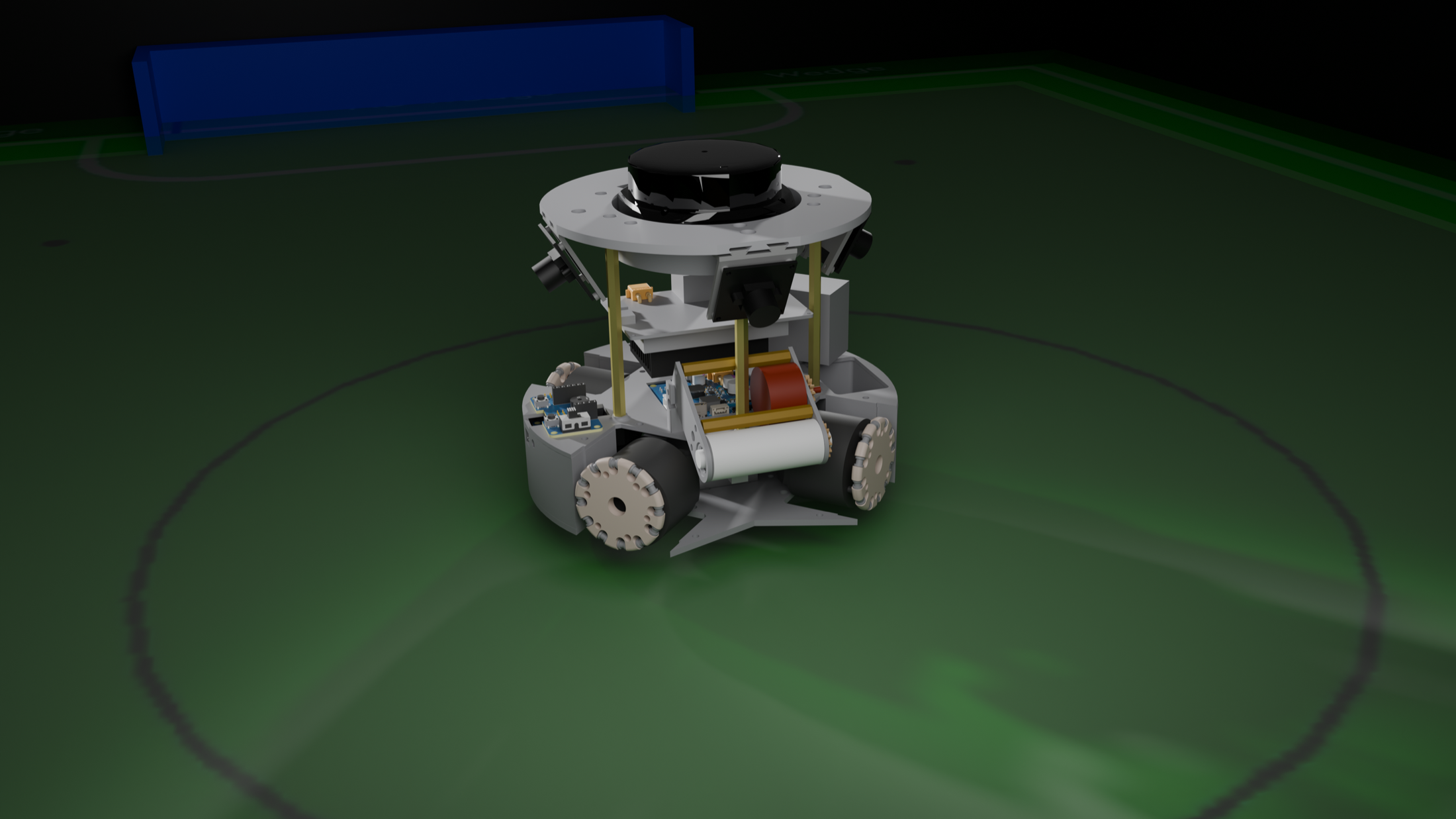
结构围绕换电、维护、运球器、击球器、避震和传感器视野设计, 目标是在高强度对抗和临赛维护中保持可用。
软件侧统一坐标系、底盘接口、传感器哨兵值和攻防状态机, 让现场题、追球、防守和射门逻辑可以被复用与验证。
Unity 场景提供真值、UDP 控制、相机流和多机器人联调, 用于策略回归测试、视觉链路验证和比赛流程演练。
Work



Posters
用来放每个赛季的一页式展示海报。后续新增海报时,把 PDF 或图片放进 assets/posters,再补一张卡片即可。
Season
旧结构、电池仓、盘球机构和 OpenMV 单板瓶颈暴露,队伍开始拆分视觉与决策职责。
MaixCam 验证、多进程优化、树莓派 5 四 USB 摄像头和 LiDAR 建系路线成形。
YOLOv8 多目标检测、边缘推理、UDP/Socket 服务和可配置端口进入主线。
Unity 仿真、自动化回归、自适应避震、策略代码修正和现场容错成为重点。
Stack
Xelerator 的工具链覆盖建模、视觉、部署和策略验证。每个模块都必须回答同一个问题: 它能不能让机器人在比赛场地里更稳定地完成动作。
 YOLO / model deployment
YOLO / model deployment
 3D modeling and iteration
3D modeling and iteration
 Edge AI acceleration
Edge AI acceleration
